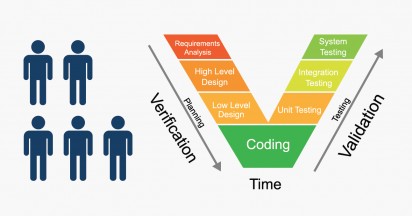
FROM MANUAL CODE TO MBD
A major actor of the automotive industry has asked us to work on the development of a dual clutch transmission software for an high end driveline system. This development was made in several steps, from prototypes to SOPs (five different vehicles). Nalys’ experts handled the project’s scope in its entirety, from architecture, project management and models development to integration and validation.

CONTEXT
Before the beginning of the project, an agreement was made to provide a black box product so that the customer could only perform calibration/validation activities (using ETAS INCA). After the initial five years of SW development, the customer decided to upgrade the transmission controller and used the opportunity to request AUTOSAR and Model-Based Design SW.
AUDIT & ANALYSIS
The migration was planned in several steps:
- Code generation tool evaluation
(Mathworks Simulink Coder vs dSPACE Target Link) - Comparison between C and MBD development (RAM, code sizes, CPU load and workload)
- Evaluation of AUTOSAR concepts
- Estimation of workloads
- Start of the new project for migration to MBD, using AUTOSAR tools (dSPACE System Desk)
- Development process optimization to benefit from MBD advantages
- Early simulation
- Code generation
- Easy test cases replay
DEVELOPMENT
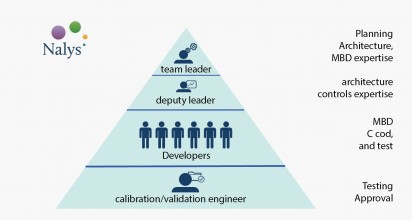
Thanks to a new team coordination and a better repartition of skills, we succeeded in reducing the MBD migration to two years. During the project, a global redesign was done in order to comply with both MBD and AUTOSAR principles. The whole application was also ported to a new ECU, with more powerful CPU for enhanced algorithms and the addition of many features.
Nalys’ Expert team
RESULTS
- Improved development process, allowing for better planning and cooperation
- Defined AUTOSAR software architecture
Reduced development time:
Clear description, understandable by a large audience
Code generation
Early testing and easier debugging
Modules with clear interfaces allowing SWC reuse
MIL, SIL on PC, using built stimuli or measurement from HIL/car.
Continuous integration
Software build
Automated testing, model coverage
Integration and validation test on HIL and vehicle
A REPLICABLE PROJECT
“As a result, the project after this one, a demo concept re-using many MBD modules, adding some new ones, was up and running in about 4 months.
It is to be noticed that the part which took the longest to develop and debug was a specific communication module, manually coded in C and involving complex OSEK and CAN configuration.”
Denis – MBD expert & project team leader